Up and Bottom Cover har en enkel struktur och en stor andel mönstring. I faktisk produktion är det lätt att skapa standardisering för att realisera automatisk produktion och minska kostnaderna. Jämfört med vikkartonger och bokformade lådor med mer komplicerade processer har den ojämförliga fördelar.
Vid produktionen av Up and Bottom Cover görs papperet till ansiktspapper av samma storlek och form genom stegen stansning och laminering; det grå papperet skärs också till samma storlek och form genom stegen stansning, rillning och hörnklibbning, och sedan kombineras det med silkespappret lamineras, och denna serie av processer kan automatiseras helt.

▲Lamineringsprocessen för produktion av upp- och bottenskydd
Från hela lamineringsprocessen kan man se att pappersmatning och limning i det tidiga skedet, och greppet och formningen i det senare skedet alla är mogna teknologier. För att uppnå hög hastighet och hög precision är visuell positionering nyckeln.
I detta avseende har Ad-tech lanserat ett högprecisions AVS visuellt positioneringssystem för himmel och jordtäcken, och utrustat med Ad-tech SCARA robot AR4215, som avsevärt kan förbättra positioneringsnoggrannheten och produktionseffektiviteten för himmel och marktäckare under automatisk laminering. Dessutom är systemet lätt att använda. I gränssnittet för interaktion mellan människa och dator kan användaren snabbt byta den visuella mallen och finjustera kompensationsvärdet för passningspositionen.

På grund av begränsningen av den tidigare processen kommer den räta vinkeln på den halvfärdiga lådan att ha grader och deformation, och papperet har olika bildförhållanden och ojämnheter, vilket allvarligt påverkar lamineringens noggrannhet. Dessutom kan samma utrustning inte säkerställa passningsnoggrannheten för olika specifikationer av himmel- och jordlådor.
För närvarande är den vanliga visuella lösningen i branschen att hitta de diagonala hörnen på papperet och lådan för att bestämma mittpunkten. På grund av ovanstående ogynnsamma förhållanden är emellertid den erforderliga mittpunkten förskjuten, vilket allvarligt påverkar lamineringsnoggrannheten hos tissuepapperet och den halvfärdiga lådan.
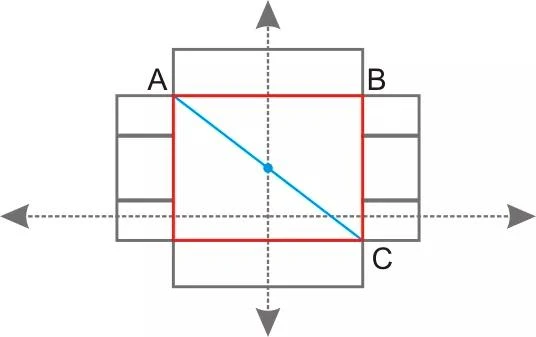
Som svar på ovanstående svårigheter lanserade Zhongweixing AVS vision system en mätbaserad positioneringslösning för himlen och marktäcket, inklusive två metoder:
① Mätmetod: Placeringen av papperet och lådan avslutas genom att mäta långsidans A-hörn och kortsidans B- och C-hörn;
② Hörnextraktionsmetod: Genom att extrahera hörnen på ytpapprets skärande hörn fullbordas placeringen av ytpapperet.

Dessa två metoder kan lösa pappers olika bildförhållande och deformationen av rätvinkliga kanter, säkerställa konsistensen hos inkommande material och sedan slutföra korrigeringen av position och vinkel. I samarbete med Ad-tech SCARA-roboten AR4215 kan papperet och lådan fästas exakt till varandra. Tillsammans når den slutliga noggrannheten ±0,1 mm.
Under produktionsprocessen, på grund av mekanisk skakning, kommer effekten av lådan att kompenseras. Vanlig praxis är att pausa roboten och sedan manuellt ändra kompensationsvärdena i x-, y- och c-riktningarna. Denna metod kommer att påverka produktionseffektiviteten och är inte lätt att använda.
I kombination med SCARA-roboten har AVS vision-mjukvaran utvecklat en robotstyrningsfunktion som realiserar interaktion mellan människa och maskin. Olika scheman kan konfigureras enligt specifikationerna för lådan och mjukpapper för att realisera en-till-en-konfiguration; kompensationsvärdet kan justeras på människa-maskin-gränssnittet. .

Till sist drar vi slutsatsen:
Programöversikt
Genom att använda fyra kameror har roboten en perfekt visuell kalibreringsmetod och den slutliga noggrannheten når ±0,1 mm;
· Den kan upptäcka rätvinklig deformation av halvfärdiga lådor, grader, olika bildförhållande på papper och dåliga inkommande material;
· Interaktion mellan människa och dator är vänligt och det är bekvämt och enkelt att byta produkter;
· Enkel felsökning, bekväm automatisk kalibrering, bara 5 minuter att slutföra en kalibrering.